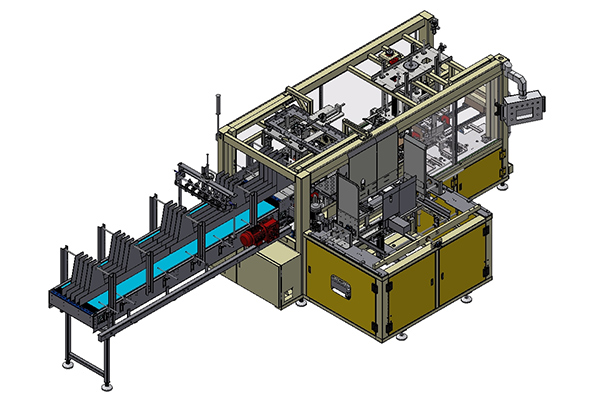
Servo koordinaatkarbi pakkimisliin (pappvaheseinaga)

Pakendite tootmisliin koosneb kiirest jagajast, toote konveieriliinist, haaramiskonveieriliinist, Hbotist, kahevõllilisest liikumismehhanismist, kastide konveieriliinist, tuvastusmehhanismist, pappvaheseinte haaratsist, pappvaheseinte etteandesüsteemist, servokoordinaadist, pudelihaaratsist ja kaitsepiirdest. Kiire jagaja jagab tooted mitmeks sõidurajaks, samal ajal kui kahevõlliline liikumismehhanism kiirendab toodete liikumist. Pärast toote saabumist pappvaheseinte jaama laadib Scar-robot pappvaheseina paigutatud toodetele. Tooted jõuavad sorteerimiskonveierile. Seejärel haarab haarats tooted ja asetab need pappkarpi ning kastkonveier transpordib toodet sisaldava kasti välja.
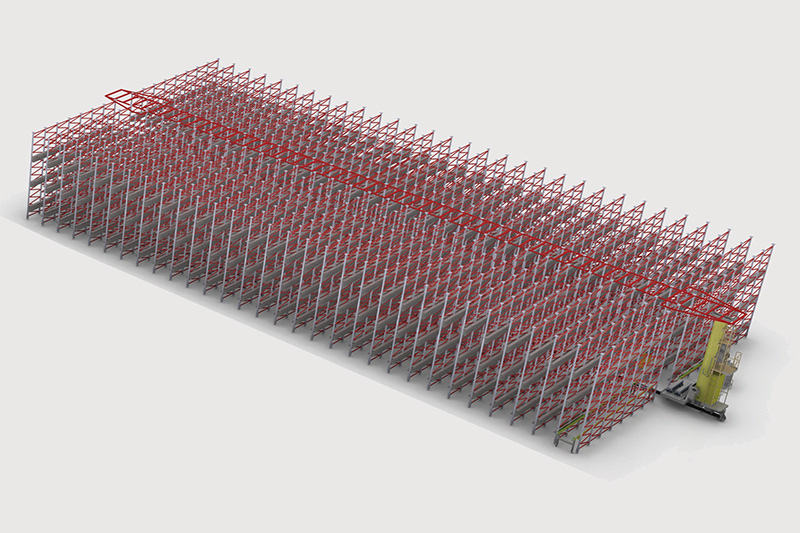
Täielik pakkimissüsteemi paigutus

Peamine konfiguratsioon
| Roboti käsi | ABB/KUKA/Fanuc |
| Mootor | SEW/Nord/ABB |
| Servomootor | Siemens/Panasonic |
| Sagedusmuundur | Danfoss |
| Fotoelektriline andur | HAIGE |
| Puuteekraan | Siemens |
| Madalpingeaparaat | Schneider |
| Terminal | Fööniks |
| Pneumaatiline | FESTO/SMC |
| Imemisketas | PIAB |
| Laager | KF/NSK |
| Vaakumpump | PIAB |
| PLC | Siemens / Schneider |
| HMI | Siemens / Schneider |
| Ketiplaat/kett | Intralox/rexnord/Regina |
Põhistruktuuri kirjeldus




Rohkem videosaateid
- Servokoordinaatpakend klaaspudelitele papist vaheseinaga