Robotitega kaubaaluste mahavõtmine
Toote üksikasjad
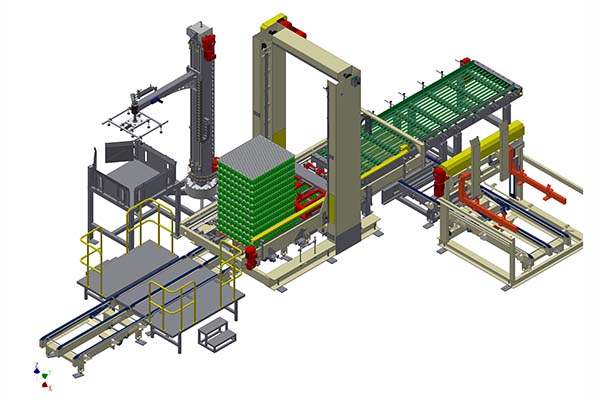
Tootmise ajal transporditakse kogu tootevirn kettkonveieri abil kaubaalustelt mahavõtmise jaama ja tõstemehhanism tõstab kogu kaubaaluse mahavõtmise kõrgusele ning seejärel võtab vahekihtide imemisseade lehe üles ja asetab selle lehtede hoidlasse, seejärel liigutab ülekandeklamber kogu tootekihi konveierile, korrates ülaltoodud toiminguid kuni kogu kaubaaluse mahavõtmise lõpuni ja tühjad kaubaalused lähevad kaubaaluste kogujasse.
Taotlus
Sobib kastide, PET-pudelite, klaaspudelite, purkide, plasttünnide, raudtünnide jne automaatseks mahalaadimiseks.
Toote väljapanek


3D-joonis

Elektriline konfiguratsioon
| Roboti käsi | ABB/KUKA/FANUC |
| PLC | Siemens |
| Sagedusmuundur | Danfoss |
| Servomootor | Elau-Siemens |
| Fotoelektriline andur | HAIGE |
| Pneumaatilised komponendid | SMC |
| Puuteekraan | Siemens |
| Madalpingeaparaat | Schneider |
| Terminal | Fööniks |
| Mootor | Õmble |
Tehniline parameeter
| Mudel | LI-RBD400 |
| Tootmiskiirus | 24000 pudelit tunnis 48000 korki tunnis 24000 pudelit tunnis |
| Toiteallikas | 3 x 380 AC ±10%, 50 Hz, 3PH + N + PE. |
Rohkem videosaateid
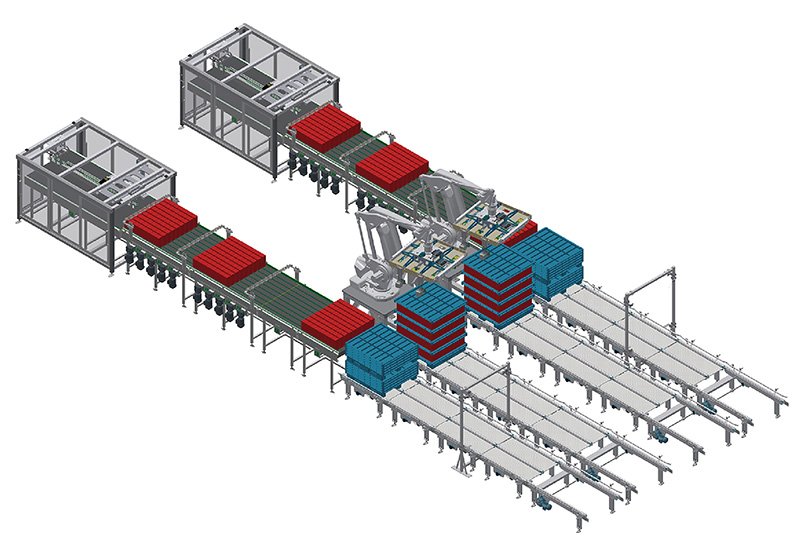
- Robotpudelite kaubaaluste mahalaadija jagamis- ja liitmisliiniga
- Robot-kastide mahalaadija jagamis- ja liitmisliiniga